
Aquest apartat conte notes sobre alguns dels projectes sueltos que vaig fent per a mi.
No estan degudament documentats i son tan en Català com en Castellà.
- PS2
- Diisplay 7 Segments
- Shield LCD amb teclat
- Pedals
- Control d’acces
- Matriu max7219
- Pont H L293H
- Termòstat Incubadora

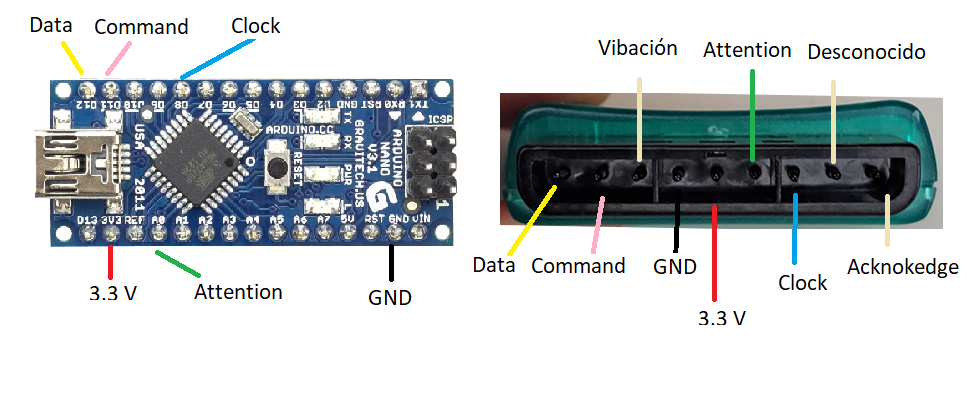
PS2
Display 7 Segments
En esta ocasión os quiero compartir el esquema de conexión de un display de 4 dígitos y 7 segmentos. Dicha conexión la realizamos con un registro de desplazamiento, el 74HC595, dicho módulo nos evite tener que conectar los 12 pines al Arduino y con solo tres de pines a la placa controlamos los 7 segmentos.
Por otro lado, conectamos directamente los cables de cada uno de los dígitos a la placa mediante una resistencia de 330ohm.
Al trabajar con dicho componente no podemos usar la instrucción usar la instrucción “delay()” ya que no nos funcionaria correctamente, con lo cual debemos hacer comprobaciones con la instrucción “millis()” o hacer otro método para provocar un retardo.
Dicha librería nos permite varias cosas que hacer con el display, como, por ejemplo: usar el mismo código para un módulo de Ánodo o Cátodo, controlar la intensidad de los leds, indicándole que punto es el decimal, etc.
Esquema de conexión:


Aplicación:
/*
* Autor: Josep Martinez Tejedor
* Fecha: 21 de febrero de 2022
* Web: josepmt.com
*/
#include <SevSegShift.h>
#define SHIFT_PIN_SHCP 6
#define SHIFT_PIN_STCP 5
#define SHIFT_PIN_DS 4
SevSegShift sevseg(SHIFT_PIN_DS, SHIFT_PIN_SHCP, SHIFT_PIN_STCP, 1, true);
void setup() {
byte numDigits = 4;
byte digitPins[] = {9, 10, 11, 12}; // Aquests són els PIN de la ** Arduino **
byte segmentPins[] = {0, 1, 2, 3, 4, 5, 6, 7}; // Aquests són els PIN de la ** del registo e desplazamiento **
bool resistorsOnSegments = false; //'falso' significa que las resistencias están en pines de dígitos
byte hardwareConfig = COMMON_ANODE; // Ver README.md para opciones
bool updateWithDelays = false; // Por defecto 'falso' es Recomendado
bool leadingZeros = false; // Use 'true' si desea mantener los ceros iniciales
bool disableDecPoint = false; // Use 'true' si su punto decimal no existe o no está conectado. Luego, solo necesita especificar 7 segmentPins[]
sevseg.begin(hardwareConfig, numDigits, digitPins, segmentPins, resistorsOnSegments, updateWithDelays, leadingZeros, disableDecPoint);
sevseg.setBrightness(20); // Intensiad de los leds hasta 90
}
void loop() {
static unsigned long tiempoejec=millis()+100; //proximo evento
static int contador=0;
if(millis()>=tiempoejec){
tiempoejec+=100; //proximo evento
contador++;
if(contador==10000){
contador=0; //reseteamos contador
}
sevseg.setNumber(contador,1); // El segundo parámetro indica la posición del punto decimal.
}
sevseg.refreshDisplay();
}/*
* Autor: Josep Martinez Tejedor
* Fecha: 21 de febrero de 2022
* Web: josepmt.com
*/
#include <SevSegShift.h>
#define SHIFT_PIN_SHCP 6
#define SHIFT_PIN_STCP 5
#define SHIFT_PIN_DS 4
SevSegShift sevseg(SHIFT_PIN_DS, SHIFT_PIN_SHCP, SHIFT_PIN_STCP, 1, true);
void setup() {
byte numDigits = 4;
byte digitPins[] = {9, 10, 11, 12}; // Aquests són els PIN de la ** Arduino **
byte segmentPins[] = {0, 1, 2, 3, 4, 5, 6, 7}; // Aquests són els PIN de la ** del registo e desplazamiento **
bool resistorsOnSegments = false; //'falso' significa que las resistencias están en pines de dígitos
byte hardwareConfig = COMMON_CATHODE; // Ver README.md para opciones COMMON_CATHODE COMMON_ANODE
bool updateWithDelays = false; // Por defecto 'falso' es Recomendado
bool leadingZeros = false; // Use 'true' si desea mantener los ceros iniciales
bool disableDecPoint = false; // Use 'true' si su punto decimal no existe o no está conectado. Luego, solo necesita especificar 7 segmentPins[]
sevseg.begin(hardwareConfig, numDigits, digitPins, segmentPins, resistorsOnSegments, updateWithDelays, leadingZeros, disableDecPoint);
sevseg.setBrightness(20); // Intensiad de los leds hasta 90
}
void loop() {
static unsigned long tiempoejec=millis()+100; //proximo evento
static int contador=0;
if(millis()>=tiempoejec){
tiempoejec+=100; //proximo evento
contador++;
if(contador==10000){
contador=0; //reseteamos contador
}
sevseg.setNumber(contador,1); // El segundo parámetro indica la posición del punto decimal.
}
sevseg.refreshDisplay();
}
Descarga de la libreria:
SevSegShift-ShiftRegister: Descargas
Shield LCD amb teclat
En esta ocasión os quiero compartir el esquema de conexión de un display de 4 dígitos y 7 segmentos. Dicha conexión la realizamos con un registro de desplazamiento, el 74HC595, dicho módulo nos evite tener que conectar los 12 pines al Arduino y con solo tres de pines a la placa controlamos los 7 segmentos.
Por otro lado, conectamos directamente los cables de cada uno de los dígitos a la placa mediante una resistencia de 330ohm.
Al trabajar con dicho componente no podemos usar la instrucción usar la instrucción “delay()” ya que no nos funcionaria correctamente, con lo cual debemos hacer comprobaciones con la instrucción “millis()” o hacer otro método para provocar un retardo.
Dicha librería nos permite varias cosas que hacer con el display, como, por ejemplo: usar el mismo código para un módulo de da Ánodo o Cátodo, controlar la intensidad de los les, indicarle que punto es el decimal, etc.
Este componente va directamente encima de la placa:

Aplicación:
/*
* Autor: Josep Martinez Tejedor
* Fecha: 23 de febrero de 2022
*/
// incluir el código de la biblioteca:
#include <LiquidCrystal.h>
int contador = 0;
// inicialice la biblioteca con los números de los pines de la interfaz
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
// Definición de caracteres especiales
byte vocal1[8] = {B00010, B00100, B00000, B01110, B00001, B01111, B10001, B01111}; // letra á
byte vocal11[8] = {B00100, B00010, B00000, B01110, B00001, B01111, B10001, B01111}; // letra à
byte vocal2[8] = {B00010, B00100, B00000, B01110, B10001, B11111, B10000, B01110}; // letra é
byte vocal21[8] = {B01000, B00100, B00000, B01110, B10001, B11111, B10000, B01110}; // letra è
byte vocal3[8] = {B00010, B00100, B00000, B01100, B00100, B00100, B00100, B01110}; // letra í
byte vocal4[8] = {B00010, B00100, B00000, B01110, B10001, B10001, B10001, B01110}; // letra ó
byte vocal41[8] = {B01000, B00100, B00000, B01110, B10001, B10001, B10001, B01110}; // letra ò
byte vocal5[8] = {B00010, B00100, B00000, B10001, B10001, B10001, B10011, B01101}; // letra ú
byte ela[8] = {B00000, B11000, B01000, B01000, B01010, B01000, B01000, B11100}; // letra l·
byte enya[8] = {B00000, B01110, B00000, B10110, B11001, B10001, B10001, B10001}; // letra ñ
byte c[8] = {B00000, B00000, B01110, B10000, B10000, B10010, B01111, B00100}; // letra ç
// FUNCIO DEL TECLAT A0
byte key(){
// 1 = 639; 2 = 409, 3 = 99, 4 = 256, 5 = 0
int val = analogRead(0);
if (val < 50) return 5;
else if (val < 125) return 3;
else if (val < 300) return 4;
else if (val < 450) return 2;
else if (val < 700) return 1;
else if (val < 1023) return 0;
}
void setup() {
lcd.createChar(1, vocal1);
lcd.createChar(2, vocal11);
lcd.createChar(3, vocal2);
lcd.createChar(4, vocal21);
lcd.createChar(5, vocal3);
lcd.createChar(6, vocal4);
lcd.createChar(7, vocal41);
lcd.createChar(8, vocal5);
lcd.createChar(9, ela);
lcd.createChar(10, enya);
lcd.createChar(11, c);
// configurar el número de columnas y filas de la pantalla LCD:
lcd.begin(16, 2);
lcd.clear();
analogWrite(10, 30);
}
void loop() {
// Posicionamos el cursor en la columna 0, linea 1
// (nota: La linea 1 corresponde a la segunda fila, ya que el conteo comienza con 0):
lcd.setCursor(0, 1);
// imprimir el número de segundos desde el reinicio:
lcd.print(millis() / 1000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("analogRead ");
lcd.print(analogRead(0));
lcd.setCursor(0, 1);
switch (key()){
case 1:
lcd.print("Selecci");
lcd.write(byte(6)); // Muestra la o acentuada
lcd.print("n: ");
break;
case 2:
lcd.print("Izquierda: ");
break;
case 3:
lcd.print("Arriba:");
// Muestra un contador en la segunda fila y posición 13
contador = contador + 1;
lcd.setCursor(13, 1);
lcd.print(contador);
break;
case 4:
lcd.print("Aba.");
// Escribe los caracteres acentuados
lcd.setCursor(5,1);
lcd.write(byte(1));
lcd.write(byte(2));
lcd.write(byte(3));
lcd.write(byte(4));
lcd.write(byte(5));
lcd.write(byte(6));
lcd.write(byte(7));
lcd.write(byte(8));
lcd.write(byte(9));
lcd.write(byte(10));
lcd.write(byte(11));
break;
case 5:
lcd.print("Derecha:");
break;
}
delay(250);
}Pedals


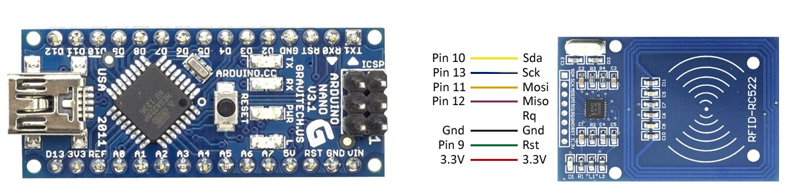
Contol d’Acces
/*
Programa: Control de Acceso a Puertas con RC522
Autor: Humberto Higinio
Facebook: https://www.facebook.com/humberto.higinio
Instagram: https://www.instagram.com/humberto.higinio/
Twitter: https://twitter.com/hhiginio
Canal de Youtube: https://www.youtube.com/user/HHSolis
Video Exclusivo para mi canal de Youtube
Todos los Derechos Reservados - 2019
Código de Dominio Público
*
* Typical pin layout used:
* -----------------------------------------------------------------------------------------
* MFRC522 Arduino Arduino Arduino Arduino Arduino
* Reader/PCD Uno/101 Mega Nano v3 Leonardo/Micro Pro Micro
* Signal Pin Pin Pin Pin Pin Pin
* -----------------------------------------------------------------------------------------
* RST/Reset RST 9 5 D9 RESET/ICSP-5 RST
* SPI SS SDA(SS) 10 53 D10 10 10
* SPI MOSI MOSI 11 / ICSP-4 51 D11 ICSP-4 16
* SPI MISO MISO 12 / ICSP-1 50 D12 ICSP-1 14
* SPI SCK SCK 13 / ICSP-3 52 D13 ICSP-3 15
*/
#include <SPI.h>
#include <MFRC522.h>
#define SS_PIN 10
#define RST_PIN 9
#define RELAY 6 // Pin del Relay
MFRC522 mfrc522(SS_PIN, RST_PIN); // Crea la instancia MFRC522
//byte Usuario1[4]= {0xE6, 0xCD, 0xE7, 0xA0} ; // NUMERO DEL USUARIO 1 (ponga el de su tarjeta)
//byte Usuario1[4]= {0xE6, 0xCD, 0xE7, 0xA0} ; // NUMERO DEL USUARIO 2 (ponga el de su tarjeta)
int vermell = 2;
int verd = 3;
void setup()
{
Serial.begin(9600); // Inicializa la comunicacion serial
SPI.begin(); // Inicializa el bus SPI
mfrc522.PCD_Init(); // Inicializa el MFRC522
pinMode(RELAY, OUTPUT);
digitalWrite(RELAY, LOW);
Serial.println("Ponga su Tarjeta para la lectura...");
Serial.println();
pinMode(vermell, OUTPUT);
pinMode(verd, OUTPUT);
digitalWrite(vermell, HIGH);
}
void loop()
{
// Mirando para nuevas tarjeras
if ( ! mfrc522.PICC_IsNewCardPresent())
{
return;
}
// Selecciona una de las tarjetas
if ( ! mfrc522.PICC_ReadCardSerial())
{
return;
}
// Muestra el UID sobre el Monitor Serial
Serial.print("UID tag :");
String content= "";
byte letter;
for (byte i = 0; i < mfrc522.uid.size; i++)
{
Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ");
Serial.print(mfrc522.uid.uidByte[i], HEX);
content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " "));
content.concat(String(mfrc522.uid.uidByte[i], HEX));
}
Serial.println();
Serial.print("Message : ");
content.toUpperCase();
if (content.substring(1) == "E0 8E 8F 7C") //Cambie aqui el UID de las tarjetas que usted desea dar acceso
{
Serial.println("Acceso Autorizado targeta");
digitalWrite(vermell, LOW);
digitalWrite(verd, HIGH);
digitalWrite(RELAY, HIGH);
delay(1000);
digitalWrite(RELAY,LOW);
digitalWrite(vermell, HIGH);
digitalWrite(verd, LOW);
}
if (content.substring(1) == "B0 2C 22 83") //Cambie aqui el UID de las tarjetas que usted desea dar acceso
{
Serial.println("Acceso Autorizado clauer");
digitalWrite(RELAY, HIGH);
digitalWrite(vermell, LOW);
digitalWrite(verd, HIGH);
delay(1000);
digitalWrite(RELAY,LOW);
digitalWrite(vermell, HIGH);
digitalWrite(verd, LOW);
}
}
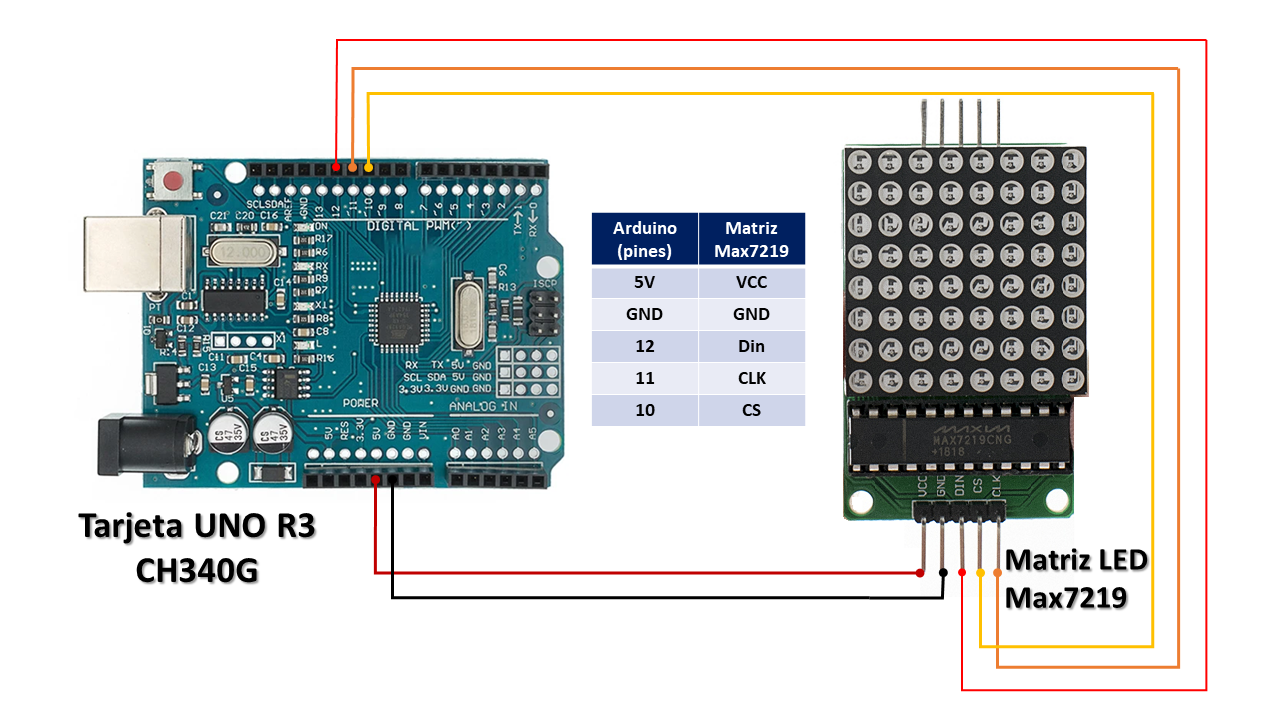
Matriu max7219
#include <MatrizLed.h>
MatrizLed pantalla;
void setup() {
// put your setup code here, to run once:
pantalla.begin(12,11,10,1); // (Dpin,Clk,cs,#matrices)
pantalla.setIntensidad(10); // de 1 a 15 donde 15 es la mayor intensidad
pantalla.borrar();
delay(2000);
pantalla.setLed(0,0,0,true); // (#matriz, fila, columna, estado);
pantalla.setLed(0,1,1,true);
pantalla.setLed(0,2,2,true);
pantalla.setLed(0,3,3,true);
pantalla.setLed(0,4,4,true);
pantalla.setLed(0,5,5,true);
pantalla.setLed(0,6,6,true);
pantalla.setLed(0,7,7,true);
delay(2000);
efectoHorizontal();
efectoVertical();
efectoHorizontal();
efectoVertical();
efectoHorizontal();
efectoVertical();
pantalla.escribirCaracter('E',0); //(Caracter, Pantalla)
delay(500);
pantalla.escribirCaracter('L',0);
delay(500);
pantalla.escribirCaracter('E',0);
delay(500);
pantalla.escribirCaracter('C',0);
delay(500);
pantalla.escribirCaracter('T',0);
delay(500);
pantalla.escribirCaracter('R',0);
delay(500);
pantalla.escribirCaracter('O',0);
delay(500);
pantalla.escribirCaracter('N',0);
delay(500);
pantalla.escribirCaracter('I',0);
delay(500);
pantalla.escribirCaracter('C',0);
delay(500);
pantalla.escribirCaracter('S',0);
delay(500);
pantalla.escribirCaracter('P',0);
delay(500);
pantalla.escribirCaracter('O',0);
delay(500);
pantalla.escribirCaracter('T',0);
delay(500);
}
void loop() {
// put your main code here, to run repeatedly:
// vamos a escribir el nombre que queramos, en mi caso ElectronicSpot,
// en modo scroll hacia la izquierda
pantalla.escribirFraseScroll("ELECTRONIC SPOT",100);
}
void efectoHorizontal(){
for (int i = 0;i <= 7; i++){
for (int j = 0;j <= 7; j++){
pantalla.setLed(0,i,j,true); //enciende 8 leds de cada fila
}
delay(50);
for (int j = 0;j <= 7; j++){
pantalla.setLed(0,i,j,false); //apaga 8 leds de cada fila
}
}
for (int i = 6; i >=0; i--){
for (int j = 0;j <= 7; j++){
pantalla.setLed(0,i,j,true); //enciende 8 leds de cada fila
}
delay(50);
for (int j = 0;j <= 7; j++){
pantalla.setLed(0,i,j,false); //apaga 8 leds de cada fila
}
}
}
void efectoVertical(){
for (int i = 0;i <= 7; i++){
for (int j = 0;j <= 7; j++){
pantalla.setLed(0,j,i,true); //enciende 8 leds de cada fila
}
delay(50);
for (int j = 0;j <= 7; j++){
pantalla.setLed(0,j,i,false); //apaga 8 leds de cada fila
}
}
for (int i = 6; i >=0; i--){
for (int j = 0;j <= 7; j++){
pantalla.setLed(0,j,i,true); //enciende 8 leds de cada fila
}
delay(50);
for (int j = 0;j <= 7; j++){
pantalla.setLed(0,j,i,false); //apaga 8 leds de cada fila
}
}
}Pont H L293D
int mda=7;
int mdr=8;
int vel=5;
void setup() {
Serial.begin(9600);
pinMode(mda, OUTPUT);
pinMode(mdr, OUTPUT);
pinMode(vel, OUTPUT);
digitalWrite(mda, LOW);
digitalWrite(mdr, LOW);
analogWrite(vel, 0);
}
void loop() {
// Gir sentit horari
digitalWrite(mda, HIGH);
digitalWrite(mdr, LOW);
velocitat_augmenta();
velocitat_decrementa();
delay(1000);
// Para motors
digitalWrite(mda, LOW);
digitalWrite(mdr, LOW);
delay(1000);
// Gir sentit antihorari
digitalWrite(mda, LOW);
digitalWrite(mdr, HIGH);
velocitat_augmenta();
velocitat_decrementa();
delay(1000);
}
void velocitat_augmenta(){
int i,j;
for(i=127; i<=255; i++){
analogWrite(vel, i);
Serial.print("Valor de i: ");
Serial.println(i);
delay(20);
}
Serial.println("Canvi...");
}
void velocitat_decrementa(){
int i;
for(i=255; i>=127; i--){
analogWrite(vel, i);
Serial.print("Valor de i: ");
Serial.println(i);
delay(20);
}
Serial.println("Fi del cicle");
}
Termòstat Incubadora
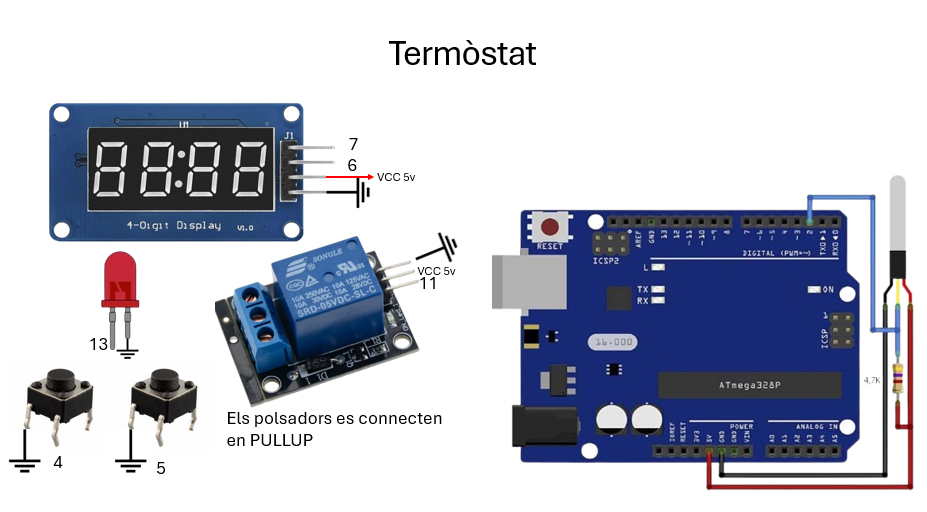
/*
* ATMega 328P (Old BootLoader) Arduino Nano
* Rele 11 Gris
* Led 13 Vermell
* Senso moviment 12 Carbaça, vermell Vcc
* Sensor de llum A6 verd i a ppositiu amb una resistencia
* Display Din 2 Carbaça
* Clk 3 Marro ==> vermell
* Pulsador blau 4
* Pulsador vermell 5
* Termemotre 6
*
* Termometre:
* https://programarfacil.com/blog/arduino-blog/ds18b20-sensor-temperatura-arduino/
* Display 4 de 7 Segments:
*/
#include <OneWire.h>
#include <DallasTemperature.h>
#include "TM1637.h"
#define CLK 7 // Pin CLK
#define DIO 6 // Pin DIO
TM1637 tm1637(CLK,DIO);
int rele = 11;
int led = 13;
const int bblau = 4;
const int bvermell = 5;
int tmax = 37;
int tmin = 0;
int tactual;
int periodo = 4000;
unsigned long TiempoAhora = 0;
int vdisplay = 0;
// Pin donde se conecta el bus 1-Wire del termometro
const int pinDatosDQ = 2;
// Instancia a las clases OneWire y DallasTemperature
OneWire oneWireObjeto(pinDatosDQ);
DallasTemperature sensorDS18B20(&oneWireObjeto);
void setup() {
// Iniciamos la comunicación serie
Serial.begin(9600);
// Iniciamos el bus 1-Wire
sensorDS18B20.begin();
// Display d4 de 7 segmentos
tm1637.init(); // Inicializa modulo
tm1637.set(2); // Brillo, 0 (minimo) a 7 (maximo)
tm1637.point(POINT_ON); // Apaga dos puntos, POINT_ON para encenderlos
pinMode(rele, OUTPUT);
pinMode(led, OUTPUT);
//Configuramos el pin del botón como entrada de pull-up
pinMode(bblau, INPUT_PULLUP);
pinMode(bvermell, INPUT_PULLUP);
}
void loop() {
// Mandamos comandos para toma de temperatura a los sensores
// Serial.println("Mandando comandos a los sensores");
sensorDS18B20.requestTemperatures();
// Leemos y mostramos los datos de los sensores DS18B20
Serial.print("Temperatura sensor 0: ");
Serial.print(sensorDS18B20.getTempCByIndex(0));
Serial.println(" C");
// Convercio de la temperatura
int vtemp= sensorDS18B20.getTempCByIndex(0)*100.0; // centGrados=2756
tactual = sensorDS18B20.getTempCByIndex(0); // Sense decimals
//Guardamos en una variable la lectura del botón
//En pull-up guardará 1 no pulsado, 0 pulsado
int botob = digitalRead(bblau);
int botov = digitalRead(bvermell);
if (botob == 0){
tmax = tmax - 1;
Serial.print("............... ");
Serial.println(tmax);
vdisplay = 1;
TiempoAhora = millis();
}
if (botov == 0){
tmax = tmax + 1;
Serial.print("............... ");
Serial.println(tmax);
vdisplay = 1;
TiempoAhora = millis();
}
// Control del rele
// Si la temperatura está per sota a ...
if(tactual < tmax){
if (tmin > 0){
if (tactual < tmax -1){
tmin = 0;
}
}else{
digitalWrite(rele, HIGH);
digitalWrite(led, HIGH);
}
}
// Si la temperatura es iggual a tmax apegar la calor
if(tactual >= tmax){
digitalWrite(rele, LOW);
digitalWrite(led, LOW);
tmin = 1;
}
//Serial.println(vtemp);
if(millis() > TiempoAhora + periodo){
TiempoAhora = millis();
vdisplay = 0;
}
if (vdisplay == 0){
tm1637.display(0, (vtemp/1000)%10); // Digito 0 => 9
tm1637.display(1, (vtemp/100)%10); // Digito 1 => 8 vTemperatura.charAt(1)
tm1637.display(2, (vtemp/10)%10); // Digito 2 => 7
tm1637.display(3, 43); // Digito 3 => 6 vtemp%10, 0x0c
}else{
tm1637.display(0, (tmax/10)%10); // Digito 0 => 9
tm1637.display(1, (tmax/1)%10); // Digito 1 => 8 vTemperatura.charAt(1)
tm1637.display(2, 0x0c); // Digito 2 => 7
tm1637.display(3, 43); // Digito 3 => 6 vtemp%10, 0x0c
}
}